
通信方法、同步和协议结构
在运行期间,Sercos 通信作为主站/从站通信循环往复地进行,循环周期在初始化时选定。循环周期可以是62微秒、125微秒、250微秒,或250微秒的任何整数倍,最多65毫秒。指定循环周期是为了获得必要的与控制器和驱动器中的固定工作周期的同步。在一个 Sercos 环内,控制器总是通信主站。通信是通过三个不同类型的消息开始的:主站同步消息(MST)被所有驱动器同时接收,用于同步NC和驱动中所有与时间相关的动作。类似于主站同步消息,主站数据消息(MDT)也被所有驱动器同时接收。它含有环中所有驱动器的循环数据和服务数据。驱动器将它们的消息(AT)连续地发送到所分配的时间槽内。
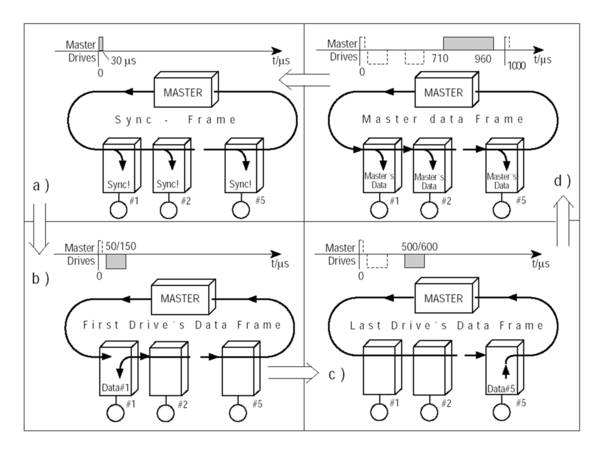 |
循环控制器与同样循环的数字驱动器之间的同步,具有微秒级的精度。所有连接驱动器的精确协调得到了保障,因为在所有驱动器中,实际值的测量完全在同一时间完成,并且所有命令值都同时变为有效。低于1微秒的同步精度不依赖于数字驱动器的数量、所选的传输速度和所配置的循环周期。在60米/分钟的速度下,1微米的空间精度相当于1微秒的时间精度。
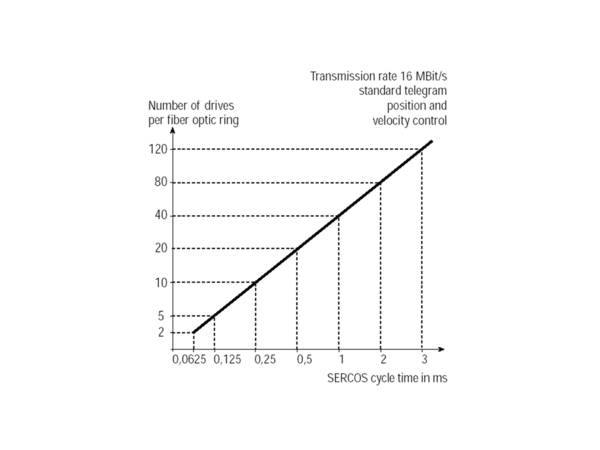
第一代 Sercos 支持的传输速率有 2 和 4 兆位/秒,而 Sercos II 支持的传输速度有 2、4、8 和 16 兆位/秒。每个环可以服务的驱动器数量取决于通信周期、运行模式和通信速度。需要时,每个控制器的驱动器数量,可以通过使用多个光纤环来扩展。
 |
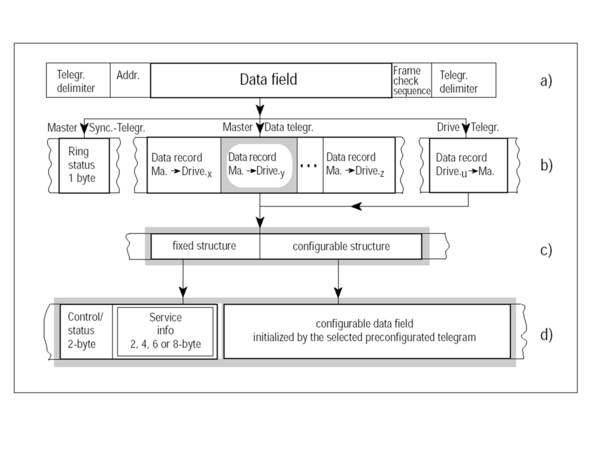
实时数据的可配置性允许任何其它运行模式可独立使用。服务数据交换仅仅在主站要求的情况下才进行。服务数据是通过在服务信息域内2、4、6 或 8 个字节份额的一个握手过程传输的,然后在接收方被重新整合。NRZI编码的 HDLC 协议被用于通信。在每个通信周期内,实时数据是在所谓的可配置数据域内传输的。在初始化阶段,识别号系统指明哪些实时数据被传输。除了命令值、实际值等数值数据之外,这些数据还可能是I/O指令的位列。已经指定了带有特定实时数据的优先消息,用于三种基本运行模式 - 力矩控制、速度控制和位置控制 - 以及速度/位置联合控制。
 |